Expositor: Scriptable Time-Travel Debugging with First Class Traces
- Michael Hicks | University of Maryland
We present Expositor, a new debugging environment that combines scripting and time-travel debugging to allow developers to automate complex debugging tasks. The fundamental abstraction provided by Expositor is the execution *trace*, which is a time-indexed sequence of program state snapshots. Developers can manipulate traces as if they were simple lists with operations such as map and filter. Under the hood, Expositor efficiently implements traces as lazy, sparse interval trees, whose contents are materialized on demand. Expositor also provides a novel data structure, the *edit hash array mapped trie*, which is a lazy implementation of sets, maps, multisets, and multimaps that enables developers to maximize the efficiency of their debugging scripts. We have used Expositor to debug a stack overflow and to unravel a subtle data race in Firefox. We believe that Expositor represents an important step forward in improving the technology for diagnosing complex, hard-to-understand bugs.
Joint work with Yit Phang khoo and Jeff Foster at Maryland. To appear at ICSE’13.
-
-

Jeff Running
-
-
Series: Microsoft Research Talks
-
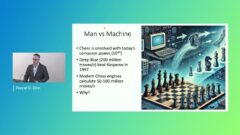
Decoding the Human Brain – A Neurosurgeon’s Experience
- Dr. Pascal O. Zinn
-
-
-
-
-
-

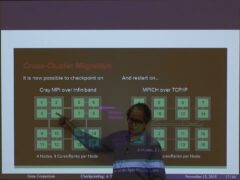
Challenges in Evolving a Successful Database Product (SQL Server) to a Cloud Service (SQL Azure)
- Hanuma Kodavalla,
- Phil Bernstein
-
Improving text prediction accuracy using neurophysiology
- Sophia Mehdizadeh
-

Tongue-Gesture Recognition in Head-Mounted Displays
- Tan Gemicioglu
-
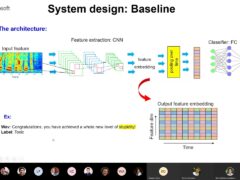
DIABLo: a Deep Individual-Agnostic Binaural Localizer
- Shoken Kaneko
-
-
-
-
Audio-based Toxic Language Detection
- Midia Yousefi
-
-
From SqueezeNet to SqueezeBERT: Developing Efficient Deep Neural Networks
- Forrest Iandola,
- Sujeeth Bharadwaj
-

Hope Speech and Help Speech: Surfacing Positivity Amidst Hate
- Ashique Khudabukhsh
-
-
-

Towards Mainstream Brain-Computer Interfaces (BCIs)
- Brendan Allison
-
-
-
-

Learning Structured Models for Safe Robot Control
- Subramanian Ramamoorthy
-